Pose Key
"Pose" is a general term used in robotics which refers to "position" or "current state". The Robotics Explained: Robot Pose page also provides a nice intuitive explanation. Please see the Geometry Classes page for a pragmatic guide on how to use them.
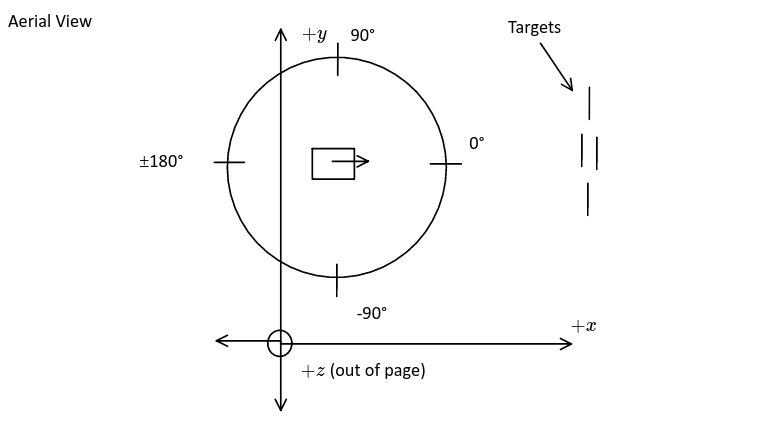
Translation2d: x, y
An (x, y) point in space.
Rotation2d: θ
A rotation (or heading) from -180 to 180 degrees. Defaults to 0.
Pose2d: x, y, θ
A pose is a Rotation2d and a Translation2d pair.
Ex: The current location and heading of the robot on the field.
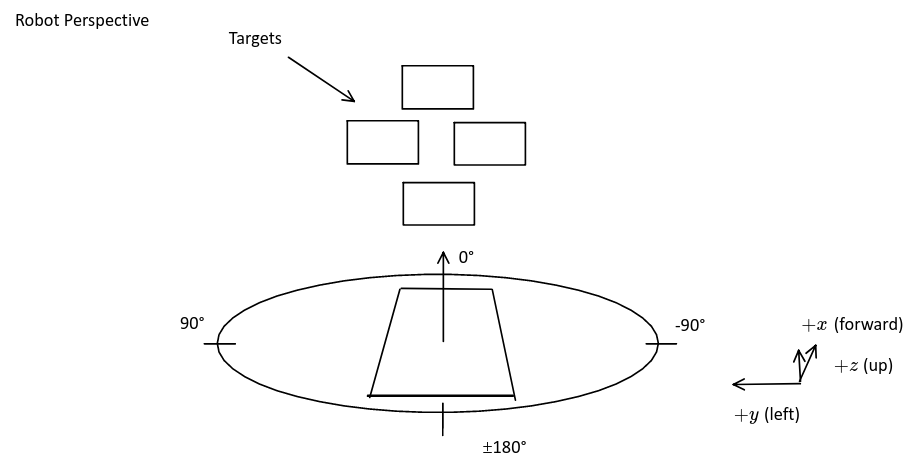
Twist2d: dx, dy, dtheta
Describes a velocity and curvature.
dx is the movement in the forward direction.
dy is the movement in the left-right direction (strafe left and right).
dtheta is the rotational movement in radians.
Watch this khan academy for more information https://www.khanacademy.org/math/multivariable-calculus/multivariable-derivatives/curvature/v/curvature-formula-part-1
Pose2dWithCurvature:
A Pose2d and Twist2d pair. AKA A robot pose, with a velocity+curvature component.