Viewing and Diagnosing Trajectories
For path visualization, to view a regular trajectory, you can use java/org/aceshigh176/lib/path_optimization/SwerveVisualizer.java.
When you get to the point of having an auto with multiple paths, java/org/aceshigh176/lib/path_optimization/SwerveVisualizerForAuto.java is set up to make a separate window for each path in the trajectory.
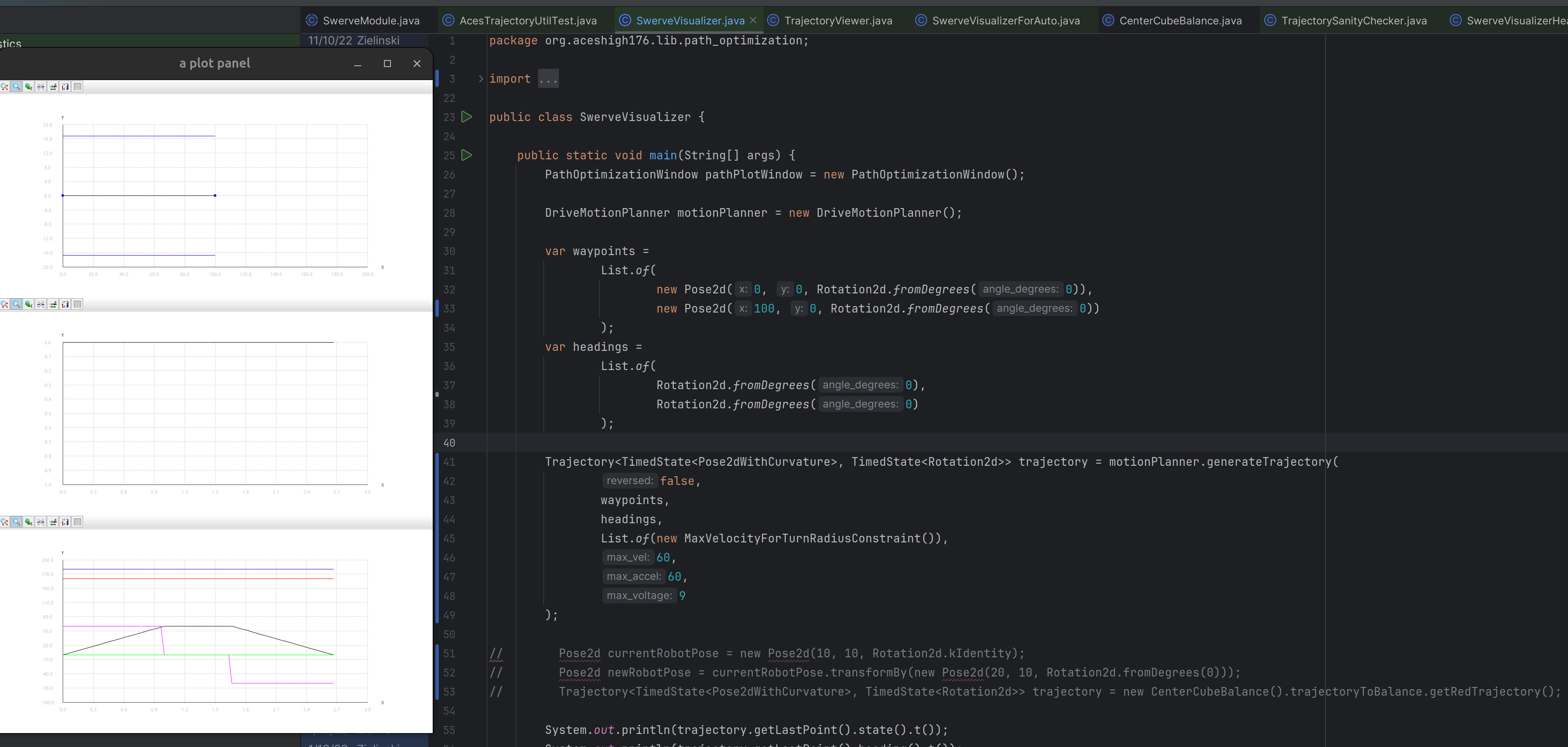
var waypoints =
List.of(
new Pose2d(0, 0, Rotation2d.fromDegrees(0)),
new Pose2d(100, 0, Rotation2d.fromDegrees(0))
);
var headings =
List.of(
Rotation2d.fromDegrees(0),
Rotation2d.fromDegrees(0)
);
Trajectory<TimedState<Pose2dWithCurvature>, TimedState<Rotation2d>> trajectory = motionPlanner.generateTrajectory(
false,
waypoints,
headings,
List.of(new MaxVelocityForTurnRadiusConstraint()),
60,
60,
9
);
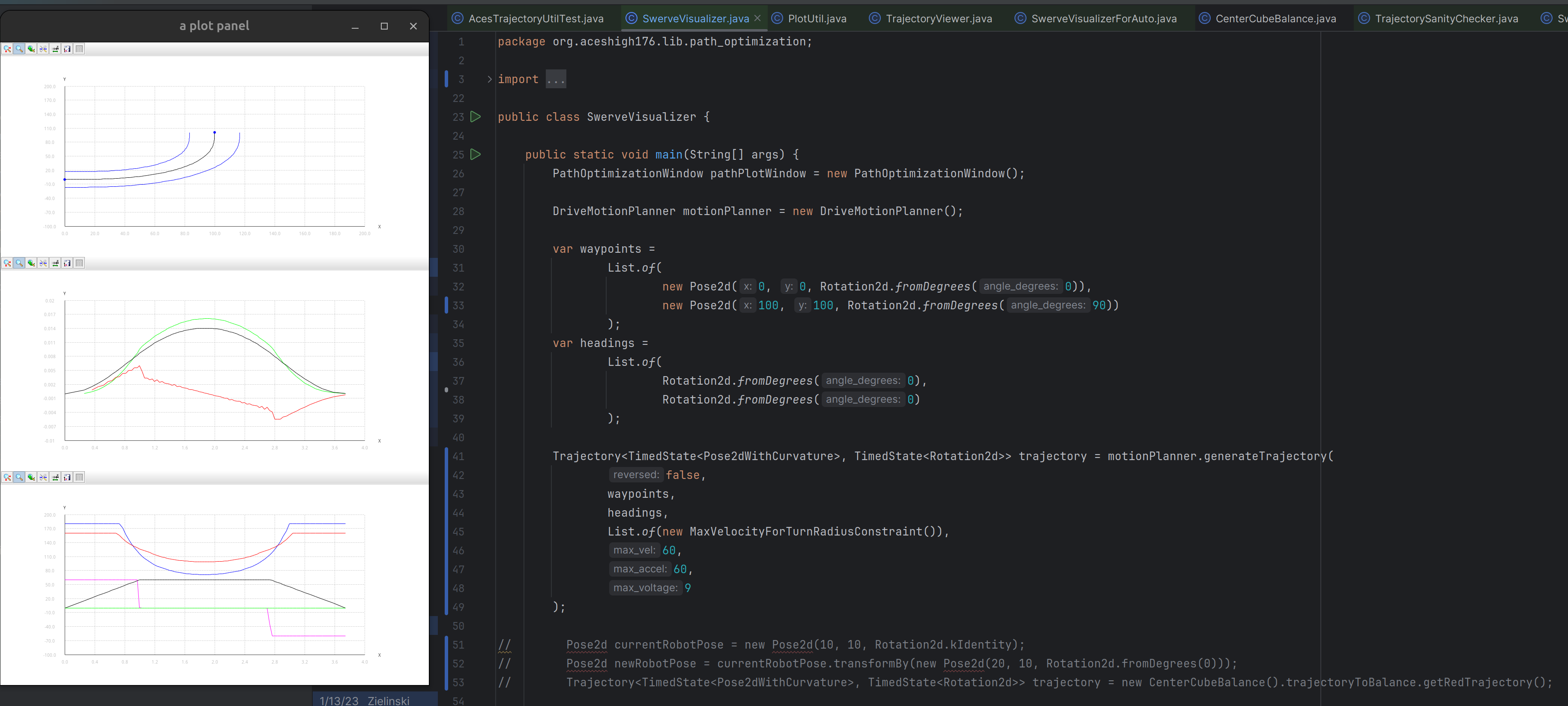
The top window is a position graph, which the edges of the robot painted.
The middle window plots:
- green: rotation velocity
- red: rotation accel
- black: curvature
The bottom window:
- black: velocity
- magenta: acceleration
- blue: turn radius
- red: max velocity (for turn radius)
- green: robot heading